
CVXPY是Python中内置的解决
凸优化问题的模块,其可以自动转化问题为标准形式,调用解法器,求解。
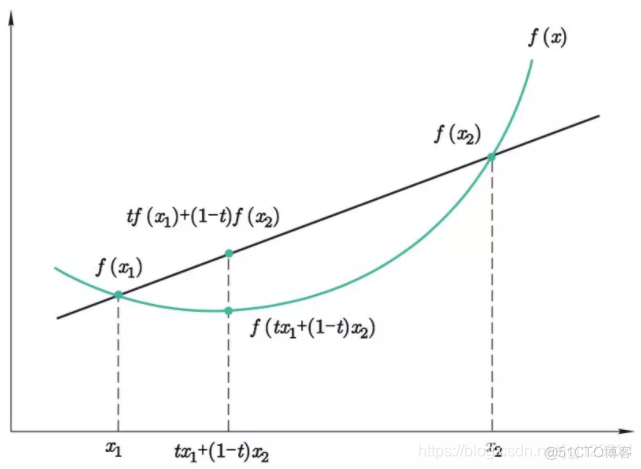
从几何上直观地理解凸函数的特点,即凸函数的割线在函数曲线的上方,如下图所示:
本文介绍求解的常见思路方法。
1. 设定变量
cvx.Variable(shape=(), name=None, var_id=None, **kwargs)
# 举例
x=cvx.Variable(shape=(10,3), name='cov', symmetric=True)
- 参数介绍
| 参数 | 参数含义 |
|---|---|
| shape | 变量的维度, 如使用(10,2) 表示 10 × 2的矩阵 |
| name | 变量名 |
| **kwargs | 可添加的其他属性:neg (负数),nonneg(非负) 等(需要用字典形式传入,如neg =True) |
2. 设定目标函数
可选cvx.Minimize(最大值)或则和cvx.Maximize(最小值)
如:cvx.Minimize(A@x)(A@x表示A点乘x)
3. 求解
- 定义问题
prob=cvx.Problem(obj,cons)
- 求解
prob.solve()
4. 实例
- 求解问题
$min_x\ \ \frac{1}{2}x_1^2 +x_2^2 -x_1x_2-2x_1-6x_2$
$s.t. \ \ \ \ \ \ x_1 +x_2 \leq 2\\ \ \ \ \ \ \ \ -x_1+2x_2\leq2\\ \ \ \ \ \ \ \ \ \ \ 2x_1+x_2\leq3\\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ 0\leq x$
- 求解思路
先将目标函数转化为二次规划问题的一般形式:
$minimize\ \frac{1}{2}x^TPx + q^Tx$
$subject\ to\ \ Gx≤h,\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ Ax=b$
可得:$P = \begin{bmatrix}1 & -1\-1&2\end{bmatrix}, f' = \begin{bmatrix}-2\-6\end{bmatrix}$
前三个约束条件可以转化为:$A = \begin{bmatrix}1&1\-1&2\2&1\\end{bmatrix}$然后求解即可。
- 完整代码
# 导入库
import numpy as np
import cvxpy as cvx
# 变量个数
x = cvx.Variable(2)
# 二次规划目标函数中的参数
P = np.array([[1, -1],
[-1, 2]])
f = np.array([-2, -6])
# 约束条件左侧
A = np.array([[1, -1],
[-1, 2],
[2, 1]])
# 约束条件右侧
b = np.array([2, 2, 3])
# 完整的目标函数
obj = cvx.Minimize((1/2)*cvx.quad_form(x, P)+f.T@x)
# 完整的约束条件(用list形式)
cons = [A@x <= b, x >= 0]
# 求解
prob = cvx.Problem(obj, cons)
prob.solve()
# 输出结果
print(prob.status, prob.value, x.value)
- 输出结果
optimal -8.839999999999998 [0.8 1.4]
参考链接:https://aistudio.baidu.com/aistudio/projectdetail/2564143

















